聯(lián)系方式 | 手機(jī)瀏覽 | 收藏該頁(yè) | 網(wǎng)站首頁(yè) 歡迎光臨南京研旭電氣科技有限公司

南京研旭電氣科技有限公司 新能源微電網(wǎng)平臺(tái)|測(cè)試電源與負(fù)載|電機(jī)控制平臺(tái)|半實(shí)物功率模組
18013301253


2024-11-15 01:14:21
多相電機(jī)控制技術(shù)作為現(xiàn)代電力電子與自動(dòng)化領(lǐng)域的重要研究方向,正逐步在高性能驅(qū)動(dòng)系統(tǒng)中展現(xiàn)出其獨(dú)特的優(yōu)勢(shì)。相比傳統(tǒng)三相電機(jī),多相電機(jī)(如五相、七相等)通過增加相數(shù),不僅提高了系統(tǒng)的冗余度和容錯(cuò)能力,還在一定程度上增強(qiáng)了電機(jī)的轉(zhuǎn)矩輸出能力和平穩(wěn)性。在控制策略上,多相電機(jī)控制引入了更為復(fù)雜的空間矢量調(diào)制技術(shù)和先進(jìn)的控制算法,如矢量控制、直接轉(zhuǎn)矩控制以及模型預(yù)測(cè)控制等,以實(shí)現(xiàn)更精確的電機(jī)狀態(tài)調(diào)節(jié)和更高的動(dòng)態(tài)響應(yīng)速度。這些技術(shù)的融合應(yīng)用,使得多相電機(jī)在航空航天、電動(dòng)汽車、船舶推進(jìn)以及高級(jí)工業(yè)制造等領(lǐng)域展現(xiàn)出巨大的應(yīng)用潛力,為實(shí)現(xiàn)高效、可靠、智能的電機(jī)驅(qū)動(dòng)系統(tǒng)提供了強(qiáng)有力的技術(shù)支持。同時(shí),隨著材料科學(xué)、半導(dǎo)體技術(shù)及數(shù)字信號(hào)處理技術(shù)的不斷進(jìn)步,多相電機(jī)控制系統(tǒng)的性能還將持續(xù)優(yōu)化,進(jìn)一步推動(dòng)相關(guān)行業(yè)的創(chuàng)新發(fā)展。電機(jī)控制可以實(shí)現(xiàn)電機(jī)的精確定位和位置控制,滿足高精度加工和裝配的需求。長(zhǎng)沙電機(jī)節(jié)能控制
交流電機(jī)控制作為現(xiàn)代工業(yè)與自動(dòng)化領(lǐng)域的重要技術(shù)之一,其重要性不言而喻。它涵蓋了從簡(jiǎn)單的電機(jī)啟停控制到復(fù)雜的速度、位置及轉(zhuǎn)矩的精確調(diào)節(jié)。在工業(yè)自動(dòng)化系統(tǒng)中,交流電機(jī),特別是異步電機(jī)和同步電機(jī),因其高效、可靠及易于維護(hù)的特點(diǎn)而被普遍應(yīng)用。交流電機(jī)控制技術(shù)的發(fā)展,依賴于先進(jìn)的電力電子技術(shù)、微處理器技術(shù)及控制理論的不斷進(jìn)步。通過變頻調(diào)速技術(shù),如PWM(脈沖寬度調(diào)制)控制,可以實(shí)現(xiàn)對(duì)交流電機(jī)轉(zhuǎn)速的平滑調(diào)節(jié),滿足各種工藝需求。智能控制算法如矢量控制、直接轉(zhuǎn)矩控制等的應(yīng)用,更是進(jìn)一步提升了交流電機(jī)的動(dòng)態(tài)響應(yīng)能力和穩(wěn)態(tài)精度,使得電機(jī)控制更加靈活、高效。隨著物聯(lián)網(wǎng)、大數(shù)據(jù)及人工智能技術(shù)的融合,交流電機(jī)控制正朝著更加智能化、自適應(yīng)化的方向發(fā)展,為工業(yè)4.0及智能制造提供強(qiáng)大動(dòng)力。無刷直流電機(jī)無位置傳感器控制定做價(jià)格電機(jī)控制可以通過控制電機(jī)的電流和電壓的波形和頻率來實(shí)現(xiàn)電機(jī)的電磁噪聲控制和電磁干擾控制。

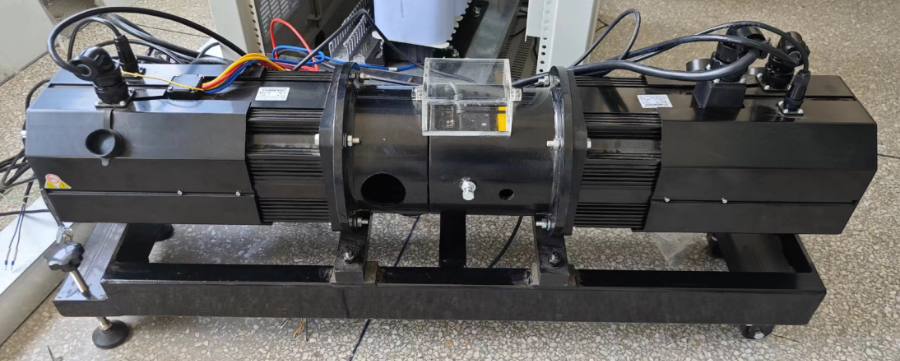
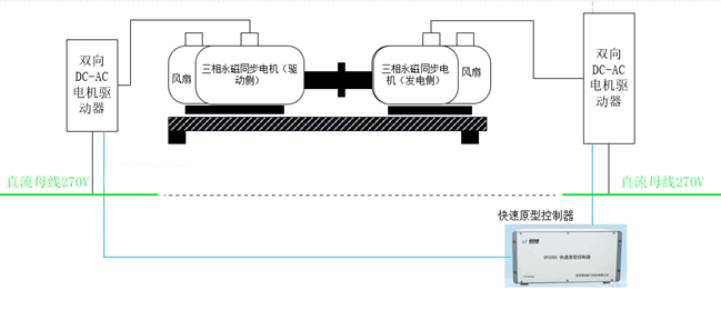
在電氣工程與自動(dòng)化領(lǐng)域,電機(jī)失磁故障實(shí)驗(yàn)平臺(tái)是一個(gè)至關(guān)重要的研究工具,它模擬了電機(jī)在運(yùn)行過程中可能遭遇的失磁現(xiàn)象,為科研人員提供了一個(gè)直觀、可控的實(shí)驗(yàn)環(huán)境。該平臺(tái)通常集成了高精度的傳感器、數(shù)據(jù)采集系統(tǒng)以及可調(diào)節(jié)的磁場(chǎng)發(fā)生裝置,能夠精確模擬不同工況下電機(jī)磁場(chǎng)的弱化乃至完全消失的過程。通過該平臺(tái),研究人員可以系統(tǒng)地觀察并記錄電機(jī)在失磁狀態(tài)下的性能變化,包括轉(zhuǎn)速波動(dòng)、轉(zhuǎn)矩下降、效率降低以及可能產(chǎn)生的振動(dòng)和噪聲等,進(jìn)而深入分析失磁故障對(duì)電機(jī)運(yùn)行穩(wěn)定性的影響機(jī)制。該平臺(tái)還支持故障模擬后的恢復(fù)實(shí)驗(yàn),驗(yàn)證不同修復(fù)策略的有效性,為電機(jī)故障診斷與維護(hù)技術(shù)的研發(fā)提供有力支持。因此,電機(jī)失磁故障實(shí)驗(yàn)平臺(tái)不僅促進(jìn)了電機(jī)理論研究的深入,也推動(dòng)了電機(jī)工程應(yīng)用技術(shù)的不斷進(jìn)步。
在進(jìn)行有刷直流電機(jī)調(diào)速實(shí)驗(yàn)時(shí),我們首先需準(zhǔn)備一臺(tái)有刷直流電機(jī)、一個(gè)可調(diào)電源、以及必要的控制電路和測(cè)量設(shè)備。實(shí)驗(yàn)的重要在于通過改變供給電機(jī)的電壓或電流來實(shí)現(xiàn)其轉(zhuǎn)速的調(diào)節(jié)。實(shí)驗(yàn)中,我們可以觀察到,隨著電源電壓的逐漸增加,電機(jī)的轉(zhuǎn)速會(huì)相應(yīng)提升,這是因?yàn)殡姍C(jī)內(nèi)部的磁場(chǎng)與電流相互作用產(chǎn)生的轉(zhuǎn)矩增強(qiáng)了。同時(shí),通過引入電阻或PWM(脈沖寬度調(diào)制)控制等調(diào)速方法,可以更精細(xì)地調(diào)節(jié)電機(jī)的轉(zhuǎn)速,以滿足不同應(yīng)用場(chǎng)景的需求。值得注意的是,在調(diào)速過程中還需關(guān)注電機(jī)的溫升情況,避免長(zhǎng)時(shí)間高負(fù)荷運(yùn)行導(dǎo)致的過熱問題。實(shí)驗(yàn)過程中還應(yīng)記錄不同電壓或占空比下的轉(zhuǎn)速數(shù)據(jù),以便后續(xù)分析電機(jī)的調(diào)速特性,為實(shí)際應(yīng)用中的電機(jī)控制策略提供理論依據(jù)。電機(jī)對(duì)拖控制具有高效性,能夠?qū)㈦娔芨咝У剞D(zhuǎn)化為機(jī)械能。
永磁同步電機(jī)(PMSM)作為現(xiàn)代電力傳動(dòng)系統(tǒng)中的重要部件,其矢量控制技術(shù)是實(shí)現(xiàn)高性能調(diào)速與精確控制的關(guān)鍵手段。該技術(shù)通過將電機(jī)定子電流分解為勵(lì)磁分量和轉(zhuǎn)矩分量,分別單獨(dú)控制,從而實(shí)現(xiàn)了對(duì)電機(jī)磁場(chǎng)和轉(zhuǎn)矩的精確調(diào)節(jié)。在矢量控制策略下,利用傳感器實(shí)時(shí)獲取電機(jī)的轉(zhuǎn)子位置與速度信息,結(jié)合先進(jìn)的控制算法,如空間矢量脈寬調(diào)制(SVPWM)和矢量解耦算法,能夠有效降低電機(jī)運(yùn)行時(shí)的諧波損耗,提升電機(jī)效率與響應(yīng)速度。矢量控制還具備良好的動(dòng)態(tài)性能,能夠在寬調(diào)速范圍內(nèi)保持較高的轉(zhuǎn)矩輸出能力,使得永磁同步電機(jī)在新能源汽車、工業(yè)自動(dòng)化、航空航天等多個(gè)領(lǐng)域展現(xiàn)出巨大的應(yīng)用潛力和價(jià)值。隨著電力電子技術(shù)、傳感器技術(shù)及控制理論的不斷進(jìn)步,永磁同步電機(jī)的矢量控制技術(shù)將持續(xù)優(yōu)化,推動(dòng)電機(jī)系統(tǒng)向更高效、更智能的方向發(fā)展。電機(jī)控制可以通過控制電機(jī)的電流和電壓的頻率和相位來實(shí)現(xiàn)電機(jī)的多軸控制和同步控制。浙江BLDC
大數(shù)據(jù)電機(jī)控制使得生產(chǎn)線能夠?qū)崟r(shí)監(jiān)控運(yùn)行狀態(tài),自動(dòng)檢測(cè)和調(diào)整設(shè)備參數(shù)。長(zhǎng)沙電機(jī)節(jié)能控制
永磁同步電機(jī)(PMSM)作為高性能電機(jī)領(lǐng)域的佼佼者,其無位置傳感器控制技術(shù)近年來備受關(guān)注。這項(xiàng)技術(shù)通過算法估算電機(jī)的轉(zhuǎn)子位置和速度,摒棄了傳統(tǒng)的機(jī)械式位置傳感器,如編碼器或霍爾元件,從而簡(jiǎn)化了電機(jī)結(jié)構(gòu),降低了系統(tǒng)成本,并提高了系統(tǒng)的可靠性和魯棒性。在無位置傳感器控制中,重要在于準(zhǔn)確且實(shí)時(shí)地估算電機(jī)的電磁狀態(tài),這通常依賴于電機(jī)的電壓、電流等電氣量以及電機(jī)的數(shù)學(xué)模型。通過先進(jìn)的控制算法,如擴(kuò)展卡爾曼濾波器(EKF)、滑模觀測(cè)器(SMO)或模型參考自適應(yīng)控制(MRAC)等,能夠?qū)崿F(xiàn)對(duì)電機(jī)狀態(tài)的精確估計(jì),進(jìn)而實(shí)現(xiàn)高精度的轉(zhuǎn)矩和速度控制。隨著人工智能和機(jī)器學(xué)習(xí)技術(shù)的不斷發(fā)展,基于數(shù)據(jù)驅(qū)動(dòng)的無位置傳感器控制方法也逐漸興起,為永磁同步電機(jī)的智能化控制開辟了新路徑。這些技術(shù)的應(yīng)用,不僅推動(dòng)了電機(jī)控制技術(shù)的革新,也為電動(dòng)汽車、工業(yè)自動(dòng)化、航空航天等領(lǐng)域的發(fā)展注入了新的活力。長(zhǎng)沙電機(jī)節(jié)能控制




